数字化转型网人工智能专题
与全球关注人工智能的顶尖精英一起学习!数字化转型网建立了一个专门讨论人工智能技术、产业、学术的研究学习社区,与各位研习社同学一起成长!欢迎扫码加入!
海尔资本定位于产业全生态投资共创平台,聚焦智能科技、医疗健康等领域产业投资,重点布局半导体、新材料、智能制造、医疗科技、医疗服务、医疗器械等细分领域,为各赛道共创方发展提供助力。优质共创方群星闪耀的背后,是海尔资本多年来专心深耕产业投资,扎扎实实培育产业生态的勤勉,基于此海尔资本形成了对细分赛道发展认识、潜力判断以及投资价值点挖掘的前瞻性视角和独特观点。
1920年,捷克作家卡雷尔·恰佩克在科幻剧本《罗莎姆万能机器人》中,首次提出了“机器人(Robot)”一词。100多年来,打造“机器人”成为人类持续追逐的梦想。如今,随着人工智能、大数据、云计算等新兴产业的发展,尤其是“人工智能+”的推进,机器人的性能得到了大幅提升,机器人产业迎来了集中爆发期。
AI的突破,也正为机器人产业注入强劲发展动力。科技企业开始借力深度学习、大模型等技术,寻求技术突破,推动机器人拥有更好性能、解锁更多场景。本文将对AI+机器人行业发展进行概述,并探讨AI机器人在产业化和家庭场景的发展路径,并对资本市场后续关注的投资方向进行分析。
一、AI+机器人行业发展概述
1. AI机器人:技术突破产生的市场需求
2020年之前,硬件技术历经多次关键突破,一次次推动机器人拓展在工业、家庭、商业、教育、医疗等应用场景边界。而2020年之后,AI技术突破赋予机器人以思维链和自主决策能力,将继续拓展机器人应用场景边界。 数字化转型网www.szhzxw.cn
◼ 协助人类完成重复、频繁、单调、长时间的工作

◼ 覆盖焊接、板与、装配、码垛、冲压等汽车制造等生产

◼ 基于实用性的产品设计,在刚性、高频场景探索功能性分化
◼ 基于垂直场景的产品,更快建立商业闭环

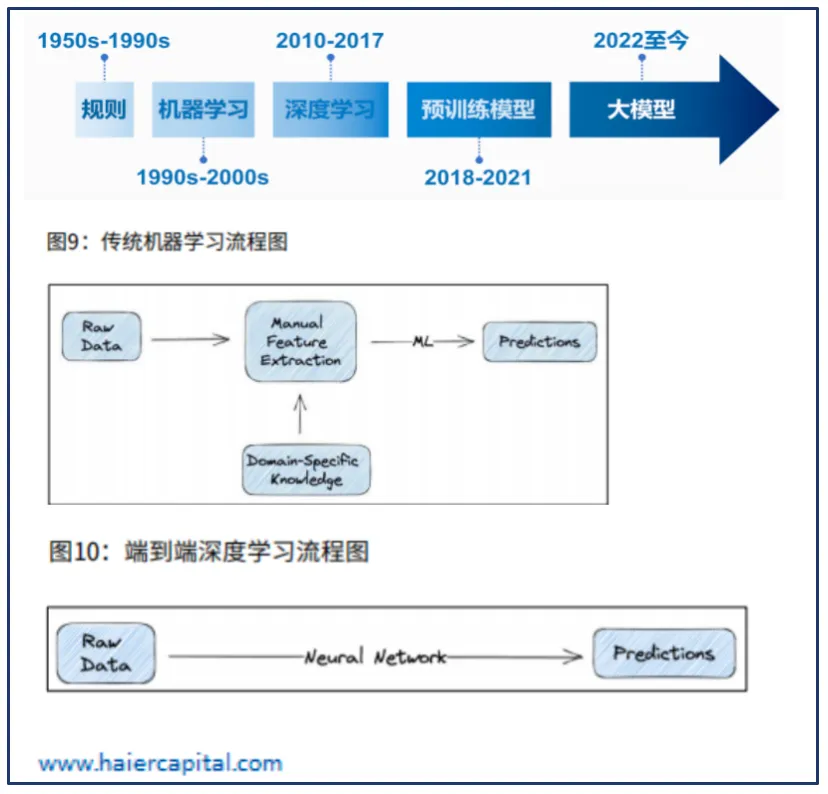
2. AI大模型技术突破,多方面展现智能化特征
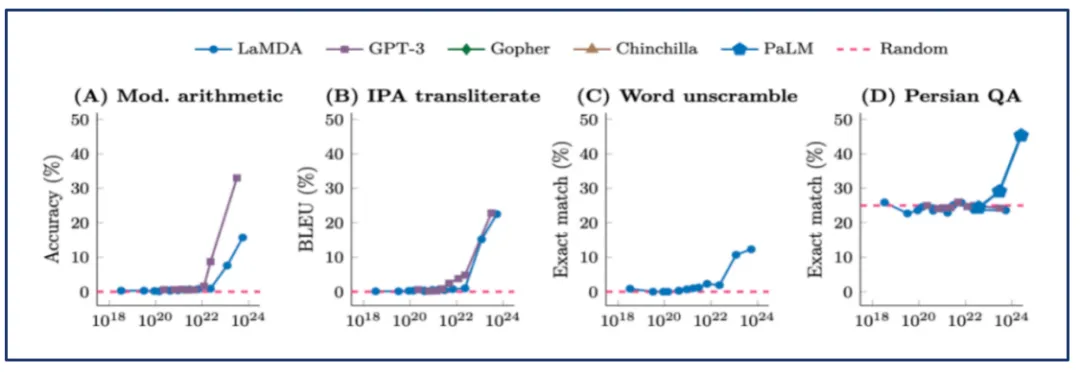
通过数万亿级的训练数据,AI大模型出现了“智能涌现”特征,使其在自然语言处理、复杂推理、世界通识的智能方面都展现了明显优于以往深度学习的智能优势。
大模型推动具身智能的两大核心能力:
① 思维链:大模型具有的复杂语义多级推理能力,将复杂任务拆分成多个子任务;
② 通用泛化:嵌入在大模型中庞大的先验知识库&强大的泛化能力,能让机器人更好地把原有的能力泛化到更通用的场景中。 数字化转型网www.szhzxw.cn
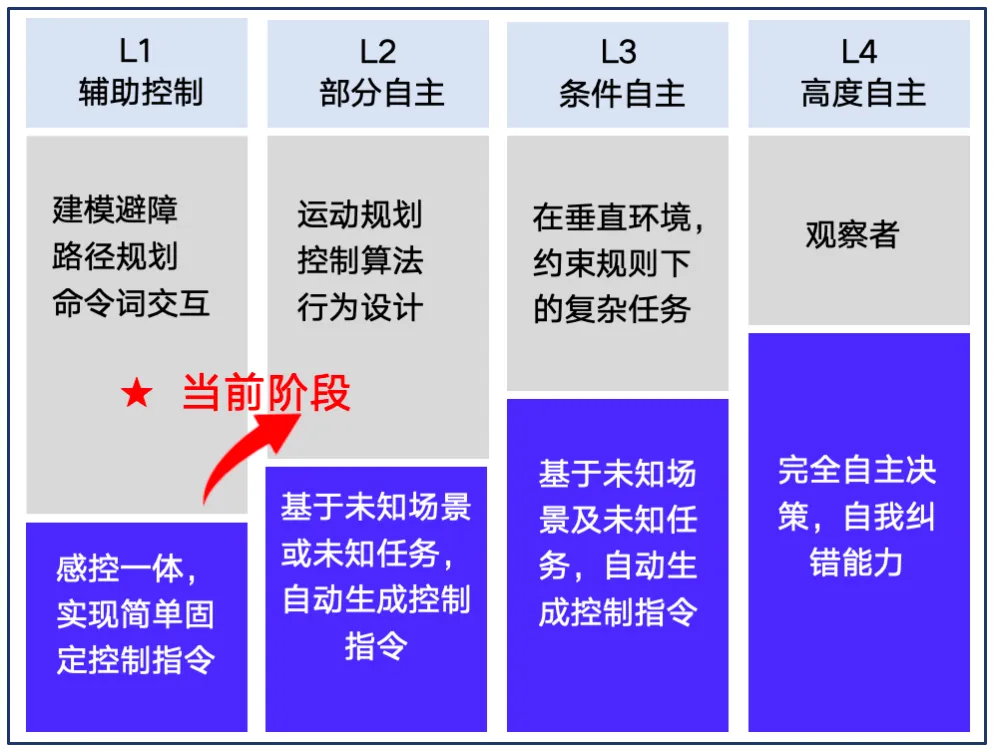
3. AI模型推动机器人行业从“自动”向“自主”
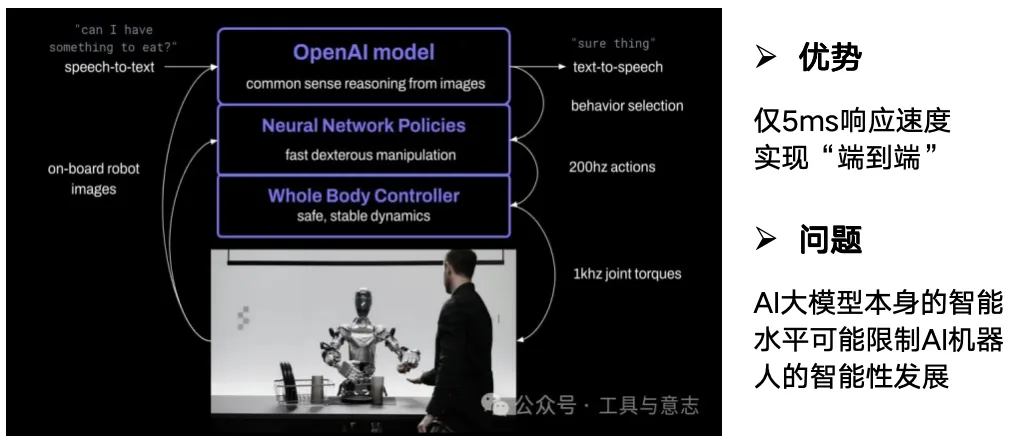
目前已发布的大模型在机器人任务理解、动作执行轨迹、3D空间信息、真实世界物理属性信息等方面的能力仍在探索初期,AI大模型本身的智能水平、机器人任务和行为控制相关的特定训练数据集缺乏等因素都可能限制AI机器人的智能性发展。
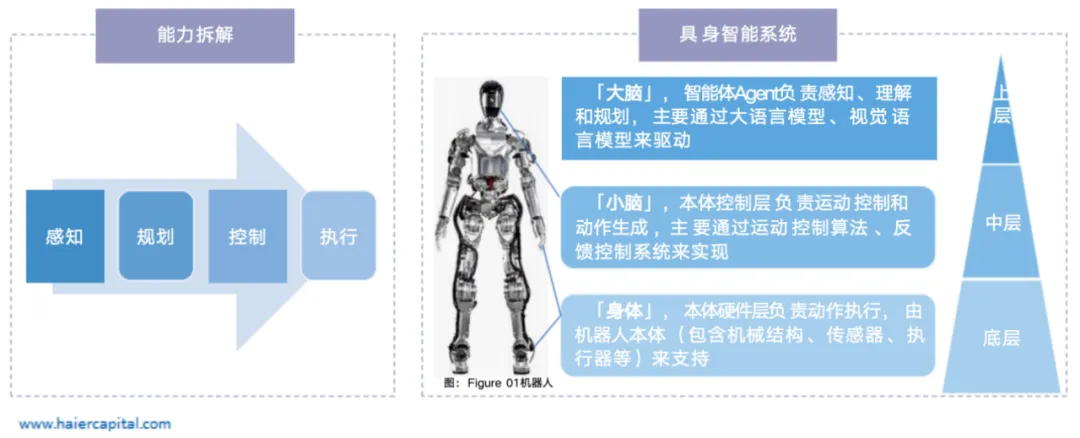
4. AI机器人以物理环境感知、交互、决策为主要特征
AI机器人由“本体”与“智能体”构成,可以感知并理解周围环境,在物理环境中自主执行具体任务。与智能汽车类似,具身智能的实现包括“感知、决策、控制”三个主要环节,相比于通用基础大模型,AI机器人模型需要更多地考虑感知能力颗粒细度与广度、与环境的交互性以及控制的协调性。
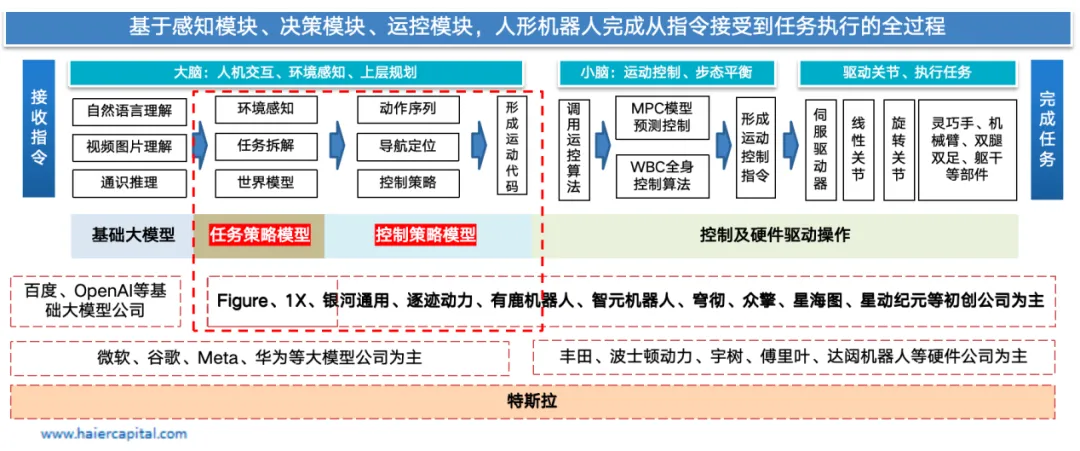
5. AI机器人实现接受指令到任务执行的全流程
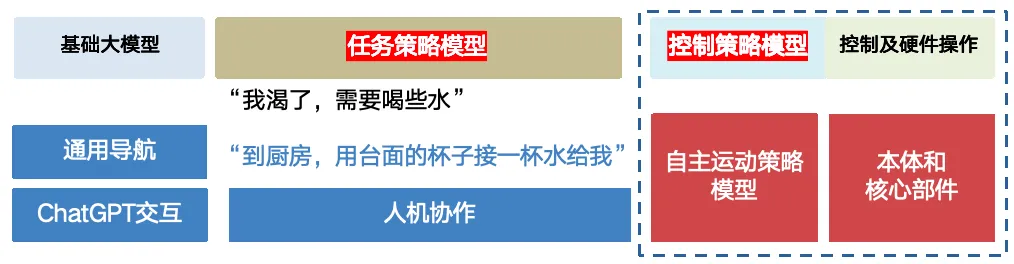
由基础大模型对自然语义的理解,结合外部环境感知,将自然语言指令transform为抽象的任务指令,由环境感知和任务策略模型进行自主规划和拆解,将任务指令transform为简单的行为指令,由控制策略模型自主规划的动作序列和编程,将行为指令transform为系列控制程序指令,交给小脑去生成执行程序指令,最终驱动伺服系统进行本体运动,实现从接受指令到任务执行的泛化交互。
6. AI机器人模型不同技术路线的探索
(1)AI机器人模型的算法方案可分为分层决策模型和端到端模型两种路线
① 端到端模型
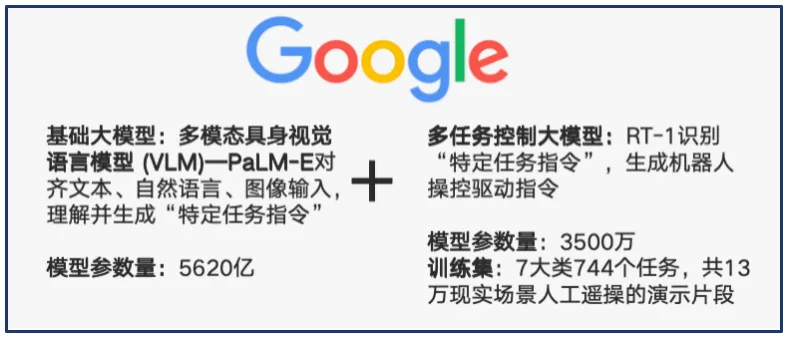
以「Google RT-2」为代表, 通过一个神经网络完成从任务目标输入到行为指令输出的全过程。首先在大规模互联网数据预训练视觉语言模型, 然后在机器人任务上微调,结合机器人动作数据,推出视觉语言动作模型。RT-2不仅负责到大脑 的感知与 规划, 还参与小脑和本体的控制与 执行。端到端模型的缺点是:训练数据海量、消 耗资源巨大、机器人执行实时性差。
②分层决策模型
以「Figure 01」 为代表, 将任务分解成不同层级, 以多个神经网络 训练, 再以流程管线的方 式组合。Figure 01顶层接入OpenAI的多模 态大模型, 提供视觉推理和语言理解;中间 层神经网络策略作为小脑进行运动控制并生成动作指令;层机器人本体接受神经网络训练的 动作指令, 进行控制执行 。分层决策模型的缺点是 :不同步骤间 的对 齐和一致性需解决。
(2)AI机器人模型的训练方法可分为模仿学习和强化学习两种路线
① 强化学习
通过与环境交互来学习最佳行为策略,最大化某种累积奖励。
优势: 能够通过探索环境学 习未知的策略;可以处理高度不确定和动态变化的环境。
劣势: 需要大量的探索和试错,学习过程缓慢;对于复杂任务,设计合适的奖励函数难度较高。
② 模仿学习
智能体通过观察和模仿专家的行为来进行强监督学习任务。
优势:可以快速学习专家策略,无需复杂的探索过程。
劣势:学习到的行为策略受限于专家数据,对于未见过的情况泛化能力较差。
二、AI机器人在产业化探索路径分析
1. 以谷歌为代表的“端到端”封闭生态框架
海外头部AI 厂商以云服务与AI大模型协同发展为底层逻辑,大模型核心技术能力为基础,通过推出“端到端”的机器人行业专用大模型,深度入局AI机器人赛道,构建一个通用性强的机器人AI开发智能生态,赋能全球的机器人硬件本体公司。 数字化转型网www.szhzxw.cn

挑战:随着训练数据量持续扩大,覆盖任务种类持续扩张的同时,大模型参数量增加带来的计算效率瓶颈,可能导致训练成本高、机器人响应速度慢、调用成本较高等系列问题。
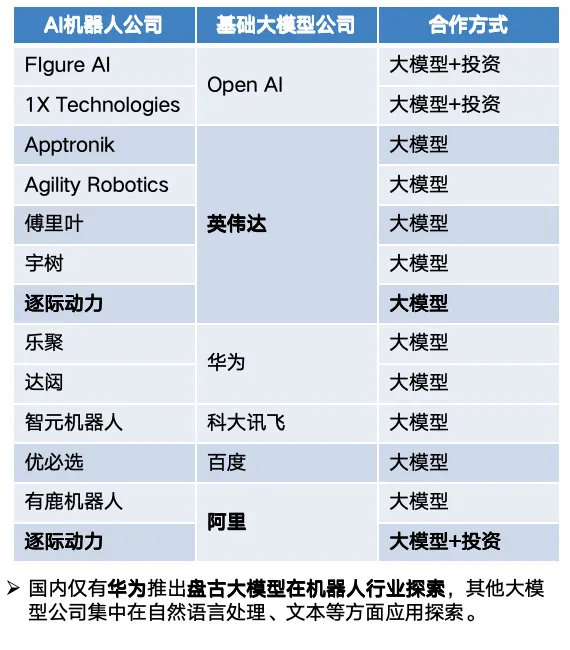
国内尚未有“端到端”机器人行业大模型推出。
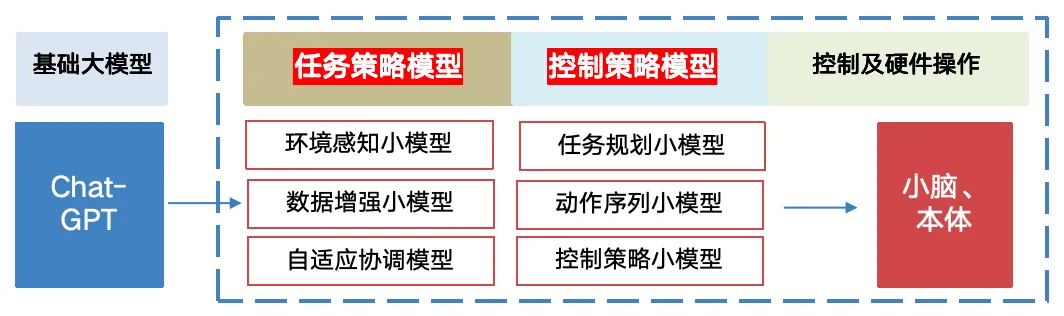
2. 以Figure为代表的“分层决策”合作开发框架
外部基础大模型作为“大脑-high level”,负责处理和理解自然语言、图文、视觉等物理信息。由AI机器人厂商自研开发环境感知、任务和控制规划,自动生成机器人程序语言,由硬件本体的各执行单元完成执行。根据垂直场景需求,以大模型为核心、以一种Pipeline的方式,组合大模型和不同的小模型/增强模型,完成复杂任务。 数字化转型网www.szhzxw.cn
3. 以1X为代表的“人机协作”开发框架
家庭场景在环境复杂度、任务随机性、动作种类多等方面存在较大挑战,1X公司由于训练难度过大,放弃单一模型后,通过“影子模式”逐步构建通用导航与单一场景多任务模型。通过人机交互/远程操作,调整位置,完成一个个任务组成的任务链。 数字化转型网www.szhzxw.cn
家庭场景在环境复杂度、任务随机性、动作种类多等方面存在较大挑战,1X公司由于训练难度过大,放弃单一模型后,通过“影子模式”逐步构建通用导航与单一场景多任务模型。通过人机交互/远程操作,调整位置,完成一个个任务组成的任务链。
4. AI机器人现状仍然面临多种挑战
① 硬件构型技术路线分歧较大。 数字化转型网www.szhzxw.cn

② 训练数据层面临数据匮乏、获取成本高、多维度数据融合等挑战。
· 多模态数据
AI机器人模型所需要的数据视觉(图像、视频)、听觉(声音)、触觉(压力、温 度、纹理等)、运动(关节角度、速度、姿态、角速度等)等更多模态数据, 以适应复杂环境和任务的泛化性。
·多维度融合
感知层产生的数据维度高、结构复杂、具有不同的格式和特征,要将此类异构数据用于具身智能的训练和应用,需要通过数据对齐方法从中挖掘有用信息,此过程中往往涉及到复杂的通识理解和转换。
· 有效数据匮乏
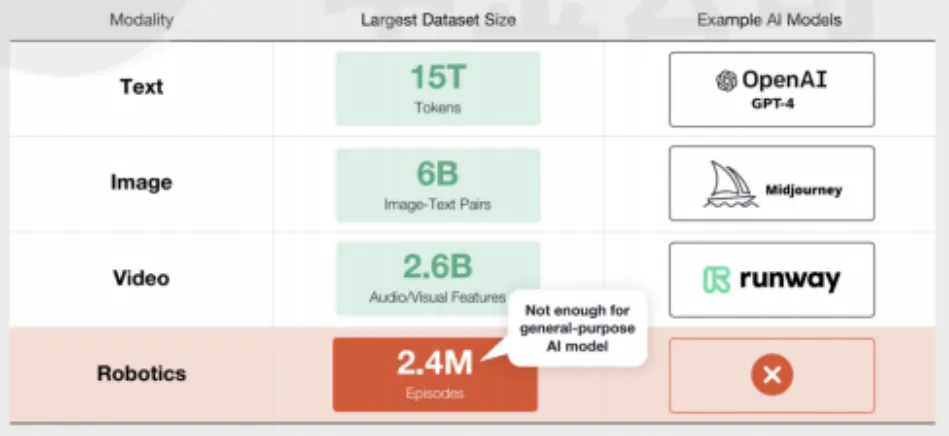
AI大模型的数据量仅有240万Tokens,相比文本模态、图片模态、视频模态至少相差2-3个数量级,
③ 真实世界环境感知理解、任务规划、动作基础策略等模型算法层面范式探索期间。
三、资本市场后续关注的投资方向
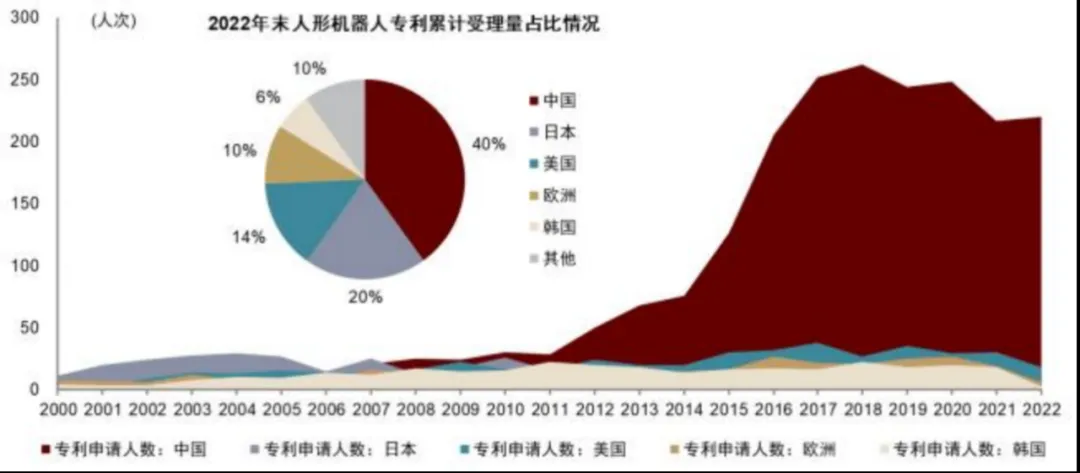
1. 产业政策:聚焦点逐渐由“机器人”细化至“人形机器人”
从全球各国研究进展来看,日美发展较早,但中国专利申请人数在2015年之后快速上升。伴随着中国工业能力和科研水平的全面进步,中国在机器人领域的竞 争身位逐渐由“跟跑”向“陪跑”甚至“领跑”前进。
2023年10月发布的《人形机器人创新发展指导意见》中明确了2025及2027年的阶段性发展目标,先攻关核心技术、再构建产业生态,首次将人形机器人上升至国家层面专项行动指导意见,战略地位有所提升。
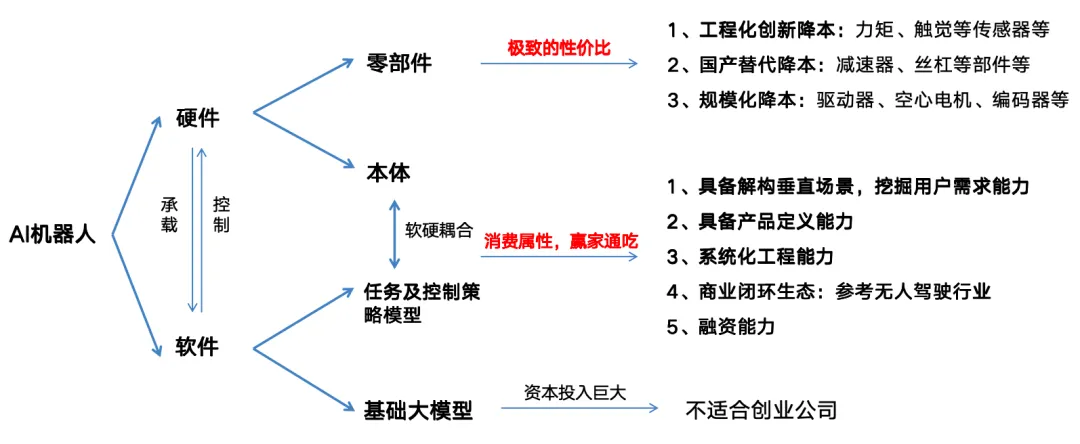
2. 投资机会分析
注:以上部分数据来源于光大证券《海外机器人系列跟踪报告(一)》、量子位智库《中国具身智能创投报告》、创业邦《2024人形机器人研究报告》等
数字化转型网人工智能专题
与全球关注人工智能的顶尖精英一起学习!数字化转型网建立了一个专门讨论人工智能技术、产业、学术的研究学习社区,与各位研习社同学一起成长!欢迎扫码加入! 数字化转型网www.szhzxw.cn
本文由数字化转型网(www.szhzxw.cn)转载而成,来源于海盈产投;编辑/翻译:数字化转型网宁檬树。